Sytim minimum atmega 8, merupakan sebuah rangkaian sederhana dari sebuah mikrokontroller.
Mikrokontroller sendiri sudah dapat bekerja atau beroperasi pada kondisi ini.
Untuk jenis mikrokontroller atmega 8 sendiri ada tiga (3) jenis yaitu seri PDIP, TQFP, dan MLF. Untuk lebih jelasnya silakan download data sheet atmega 8 disini!
Kami dari tim ROBOTRON, untuk mudah memulai belajar kami menggunakan jenis PDIP, alasannya karena mudah bagi beginner.
Berikut ini adalah bentuk dari ic atmega 8 type PDIP:
Untuk masing-masing fungsi PORT-nya silakan lihat di Datasheetnya.!
Mikrokontroller ini dapat bekerja dengan mendapatkan tegangan antara 2,7volt – 5,5volt (jadi jangan sampai salah, karena bisa rusak).
Untuk sumber tegangan sendiri biasanya kami menggunakan tegangan dari sebuah Adaptor yang kami turunkan dengan IC regulator (7805) dan LM2576 sehingga out tegangannya murni 5 volt, ataupun kami juga biasa menggunakan tegangan dari socket USB pada notebook (4,5 volt– 5,5 volt).
Berikut ini adalah sumber tegangan dari adaptor external.
Kalau yang satu ini sumber tegangannya dari adaptor USB yang ada di notebook.
Mikrokontroller AVR ini (Atmega 8), memiliki kondisi reset logika low (0), jadi jika kita ingin mereset sebuah mikrokontroller AVR Atmega8 ini, kita perlu menghubungkan pin reset dengan GND, biasanya kami menggunakan Button Push-On kalau untuk memberikan kondisi Low pada resetnya, agar mikrokontroller tidak bingung kondisi apa yang terjadi pada dirinya sebelum diberikan logika Low, maka kami menggunakan sebuah resistor Pull-Up 10kohm, berikut gambarnya:
Sekarang kita berbicara tengtang crystal (Oscillator) dan juga kapasitor pembatasnya.
Untuk sebuah mikrokontroller AVR sendiri sudah memiliki sebuah Oscillator Internal sebesar 8 MHZ, namun secara default settingannya adalah 1 MHZ, jadi jika mau kita bisa mengutak-atiknya menjadi 8MHZ pada fusebitnya (lakukanlah jika anda sudah tingkat Expert, jangan lakukan jika anda masih Beginner!).
Nah jika kita menggunakan sebuah Oscillator/Crytal dari luar (External) kita harus tahu bahwa batasan Maximum untuk Crystal dari mikrokontroller seri AVR hanyalah sebesar 16MHZ, (ingat jangan sampai lebih, karena bisa bahaya), dan jika kita menggunakan Crystal External maka kita membutuhkan sebuah Capasitor untuk membatasi detak setiap detak/Clock yang ditimbulkan oleh Oscillator External tersebut.
Banyak Orang menyarankan bahwa nilai kapasitor nya yaitu berada pada range 12pf – 22pf, namun kami dari Tim ROBOTRON sudah pernah melakukan uji coba dengan capasitor yang lebih besar nilainya, hasilnya tidak ada perbedaan yang signifinakan yang nampak, bahkan juga ketika kami tidak menggunakan sebuah capasitor hal yang sama kami dapatkan, jadi pada dasarnya tergantung kita sendiri mau mengikuti kebanyakan orang ataukah dengan cara kita sendiri.
Oscillator sendiri bekerja dengan membangkitkan sebuah frekuensi pada setiap detiknya jadi kami beranggapan pada rumus berikut, kita bisa menggunakannya:
F = 1/T
Sehingga, jika kita ingin mendapatkan sebuah frekuensi dengan siklus yang cepat, kita bisa menggunakan capasitor yang bernilai besar, seperti pada gambar berikut:
Sekarang kita membahas AVCC, Aref, dan GND, pada pin yang sebelah kanan, untuk fungsi secara detailnya sendiri dapat dilihat pada datasheet nya, namun yang pasti fungsinya itu untuk perhitungan tegangan conversi dari analog ke digital (ADC), ini penting jika kita ingin menggunakan fuiture tersebut.
Untuk pin Aref, kami tidak memberikan suply tegangan, kami kami menggunakan tegangan referensinya dari pin AVCC, nah kalau kita mau menggunakan referensi tegangan dari pin Aref silakan hubungkan ke sumber tegangan 2,7 – 5,5 volt.
ADC sendiri biasa kami gunakan untuk input dari sensor maupun pengukuran tegangan. Nah berikut gambarnya:
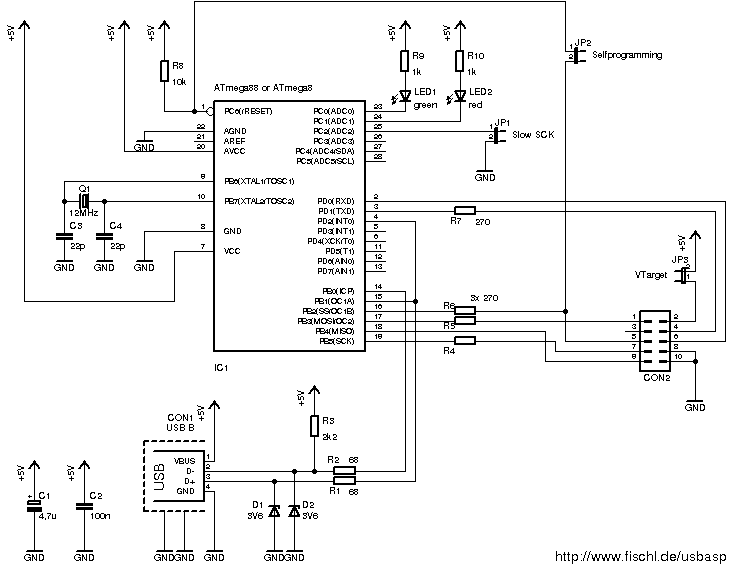
Okelah kalau begitu, sekarang kita bahas komunikasi datanya; untuk komunikasi datanya sendiri sebuah rangkaian minimum Atmega 8 ini ada banyak diantaranya adalah serial dan Paralel, komunikasi data ini akan terhubung antara rangkaian sistem minimum Atmega 8 dengan sebuah alat yang disebut Downloader. Fungsi dari downloader itu sendiri akan mengirimkan sebuah data ke mikrokontroller ini. Jadi itu penting!!!!!
Ini yang terakhir, perencanaan itu penting, jadi untuk mengantisipasi sebuah kemungkinan-kemungkinan kita harus sedia payung sebelum hujan, istilahnya kayak gitu.
Ok, tujuan membuat rangkaian sistem minimum atmega 8 adalah untuk belajar, jadi kalau begitu segala percobaan-percobaan akan kita lakukan, baik itu program maupun rangkaian sesederhana mungkin.
Makanya kita harus membuat konektor output dari port-port mikrokontroller itu sendiri, agar nantinya kita bisa menghubungkannya ke rangkaian yang lain, berikut gambarnya:
Untuk Layout rangkaian yang kami buat, kami menggunkan software Diptrace.
Sekian dulu postingan dari kami, semoga dapat bermanfaat, salam robotika dari ROBOTRON. Maju terus bangsaku